Feeding pets can be easy and on time using automatic system.
This project for Building a Smart Pet Feeder Circuit using Arduino and other parts like IC 7809, SG90 servo motor and HC-SR04 sensor to make simple pet feeder.
Feeder work with distance sensor to give food so pet can eat on time without people help, hence, this system help pet owners save time and feed pets regularly.
Arduino Code:
#include <Servo.h>
Servo myservo; // create a servo object to control the servo
const int trigPin = 9; // Trigger pin of the ultrasonic sensor
const int echoPin = 10; // Echo pin of the ultrasonic sensor
const int
servoPin = 2; // Servo motor pin
int duration, distance;
void setup() {
myservo.attach(servoPin); // attach the servo to pin 2
pinMode(trigPin, OUTPUT); // sets the trigPin as an output
pinMode(echoPin, INPUT); // sets the echoPin as an input
}
void loop() {
// Generate a pulse of 10us on the TRIGGER pin
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Read the duration of the pulse on the ECHO pin
duration = pulseIn(echoPin, HIGH);
// Calculate the distance in centimeters
distance = duration * 0.0343 / 2;
// Check if a pet is within the desired range
if (distance >= 10 && distance <= 20) {
// Dispense food by rotating the servo
myservo.write(90); // Adjust the angle as needed
delay(1000); // Delay for dispensing
myservo.write(0); // Return to initial position
}
// Add code for timer-based feeding if desired
}Circuit Working:
Parts List:
| Components | Quantity |
|---|---|
| Arduino Uno | 1 |
| IC 7809 (Voltage Regulator) | 1 |
| Servo Motor SG90 | 1 |
| Ultrasonic Distance Sensor HC-SR04 | 1 |
In this circuit diagram choose container big enough to hold pet food, then add open-close lid on container and servo motor will control this lid.
After that, fix servo motor in box so it can open and close food container properly.
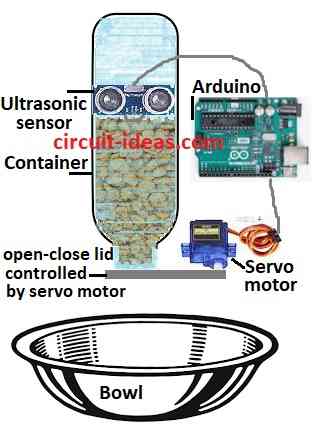
Fix ultrasonic sensor so it can see pet in set distance and then ensure pet can come in front of sensor clearly.
Put all parts inside box to protect from weather and then make small hole so pet can reach food.
The IC 7809 converts 12V to 5V, which the Arduino, servo and sensor nee, then, the system supplies 5V power to the sensor and servo through the breadboard.
HC-SR04 sensor check how far pet is by sending sound waves and measuring return time.
Servo motor control food lid and then Arduino tell servo to turn and open or close feeder.
How to Build:
For Building a Smart Pet Feeder Circuit using Arduino follow below steps for assembling:
- First, collect all parts shown in circuit diagram.
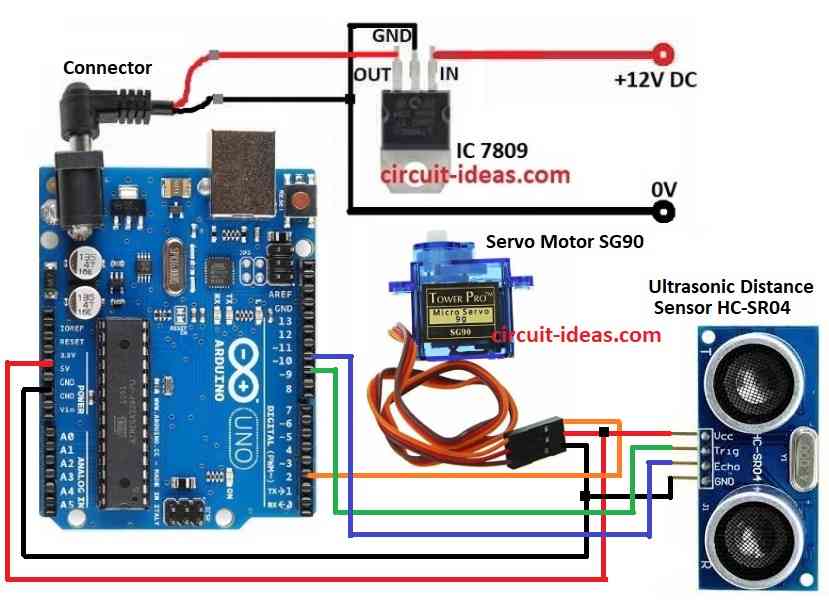
- Then connect IC 7809 to give steady 9V DC to Arduino as shown in circuit diagram.
- Next, connect Servo Motor SG90 with black wire to GND on Arduino, red wire to 5V on Arduino and orange wire to pin 2 on Arduino
- After that, connect Ultrasonic Sensor HC-SR04 with VCC to 5V on Arduino, TRIG to pin 9 on Arduino, ECHO to pin 10 on Arduino and GND to GND on Arduino
Conclusion:
Overall, this Building a Smart Pet Feeder Circuit using Arduino shows how to make automatic pet feeder using servo motor and ultrasonic sensor.
Also, it helps feed pet without human help by making pet care easier.
Leave a Reply